

Când eram copil, îmi plăcea să văd filme de desene animate cu mașini care păreau să conducă singure. M-a făcut să mă întreb dacă astfel de mașini ar putea fi reale și dacă există roboți minusculi înăuntru care le conduc magic.
Pe măsură ce îmbătrânim, mașinile autonome devin reale! Sunt cu adevărat fascinat de ei. Înțeleg ei când să se oprească la semnele de oprire și la semaforul roșu, de exemplu? Pot vedea măcar animale și oameni plimbându-se pe drum? Și ce zici de condus când afară este întuneric sau când vremea este ploioasă sau zăpadă?

Să vorbim despre mașinile care se conduc singure! Acestea sunt mașini care se pot conduce singure fără un șofer uman. Companii precum Tesla și Waymo folosesc tehnici de computer inteligente, cum ar fi învățarea profundă, pentru a face aceste mașini super inteligente. Învățarea profundă ajută mașinile să facă lucruri interesante, cum ar fi înțelegerea semnelor rutiere și conducerea în siguranță, chiar și atunci când vremea este îngrozitoare. Totul este despre utilizarea tehnologiei avansate pentru a modela modul în care ne vom deplasa în viitor!
Cuprins
Istorie
Istoria mașinilor cu conducere autonomă este asemănătoare unei aventuri lungi și captivante. Imaginează-ți anii 1920, când vehiculele autonome erau încă doar un vis pentru oameni. O minte inventiva, Francis Houdina, s-a remarcat prin crearea unei masini care urma liniile de pe drum. Cu toate acestea, avea nevoie de fire speciale ascunse sub drum pentru a-l ghida.
 Sursa: theatlantic.com
Sursa: theatlantic.com
Mergând mai departe către anii 1980 și 1990, mințile strălucitoare de la Universitatea Carnegie Mellon s-au gândit la ceva mare. Ei au dezvoltat mașini care puteau „vedea” folosind camere, ajutându-i să navigheze pe străzile aglomerate ale orașului. Aceste mașini erau ca niște exploratori care învață, descoperă cum să conducă uitându-se în jur.
Apoi, un moment semnificativ a sosit în 2004, pus pe fundalul unei provocări în deșert. Au intrat în scenă mașini care se conduceau singure, încercând o cursă grea – o cursă pe care nu au câștigat-o, dar a fost un început. Gândiți-vă la el ca la terenul lor de antrenament pentru a deveni șoferi mai buni.
Cu toate acestea, descoperirea reală a avut loc în anii 2000 și 2010, când companii importante precum Tesla, Uber și Google (acum Waymo) au intrat în sectorul auto. Google a început să testeze mașinile care se conduc singure în 2009. În 2015, mașinile Tesla au introdus o funcție prin care se puteau conduce parțial singure pe anumite drumuri. Ei puteau să se descurce cu direcția și să rămână pe drum fără control uman constant.
Pe măsură ce mai multe companii s-au alăturat cursei, competiția pentru a crea mașini complet autonome s-a încălzit. Imaginează-ți echipe de inventatori care se întrec pentru a face mașini care să poată conduce fără a avea nevoie de oameni pentru a conduce.
Dar povestea continuă. Încă lucrăm la fabricarea de mașini care să poată circula singure, ceea ce ar schimba modul în care călătorim. Această aventură încă se întâmplă și înseamnă că am putea avea călătorii mai sigure și mai ușoare, deoarece aceste mașini elegante cu conducere autonomă sunt din ce în ce mai bune.
Cum funcționează mașinile care se conduc singure?
Mașinile care se conduc singure sunt ca factorii de decizie super inteligenți! Ei folosesc camere, LiDAR, RADAR, GPS și senzori de inerție pentru a aduna date despre împrejurimile lor. Apoi, algoritmi speciali numiți algoritmi de învățare profundă procesează aceste date pentru a înțelege ce se întâmplă în jurul lor. Pe baza acestei înțelegeri, ei iau decizii importante pentru a conduce în siguranță și fără probleme.
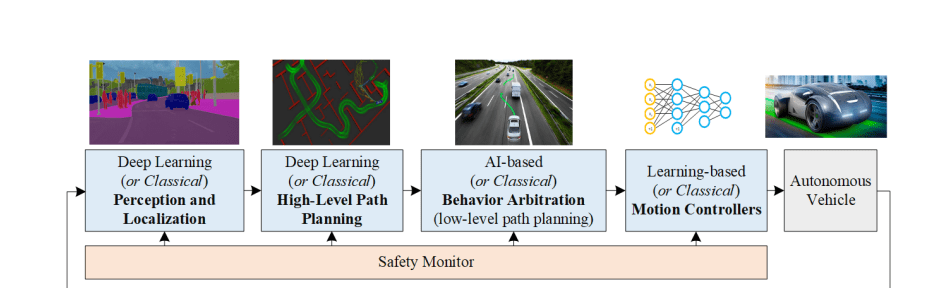 Sursa: arxiv.org
Sursa: arxiv.org
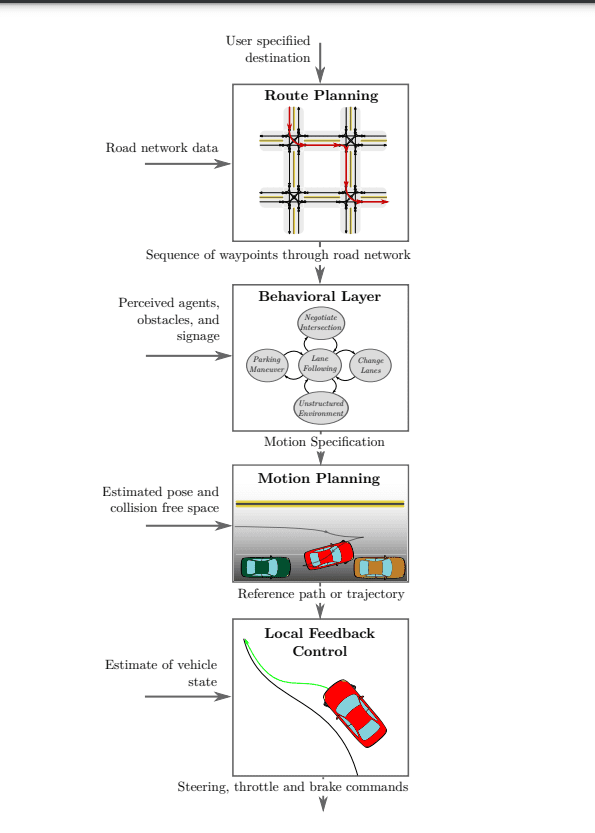
Dacă vrem să ne dăm seama cum funcționează cu adevărat mașinile cu conducere autonomă, să aruncăm o privire mai atentă la aceste patru părți prezentate în diagrama de mai sus. Este ca și cum ai rezolva un puzzle – înțelegerea fiecărei piese ne va ajuta să vedem o imagine de ansamblu a modului în care funcționează aceste mașini uimitoare:
- Percepţie
- Localizare
- Previziune
- Luarea deciziilor
- Planificarea traseului la nivel înalt
- Arbitraj de Comportament
- Controler de mișcare
Percepţie
#1. aparat foto
Camerele sunt ca ochii unei mașini care se conduce singur – sunt super importante! Ele ajută mașina să știe ce se întâmplă în jurul ei. Aceste camere fac diferite sarcini, cum ar fi să descopere ce sunt lucrurile, să separă diferite părți și să găsească unde se află mașina.
Pentru a vă asigura că mașinii nu pierde nimic, are camere amplasate peste tot – față, spate, stânga și dreapta. Aceste camere lucrează împreună pentru a face o imagine de ansamblu a tot ceea ce este în jurul mașinii. Este ca și cum ar fi vederea specială de 360 de grade a mașinii!

Aceste camere nu sunt doar pentru spectacol. Sunt deștepți. Unii arată departe, până la 200 de metri, astfel încât mașina să știe ce urmează. Alții se concentrează pe lucrurile din apropiere, astfel încât mașina să poată acorda o atenție deosebită detaliilor. Această echipă de camere ajută mașina să vadă și să înțeleagă totul, ca un prieten care o ghidează, astfel încât să poată conduce în siguranță și să facă alegeri bune.
Uneori, camerele de luat vederi sunt de mare ajutor, ca atunci când parcați, deoarece arată o vedere largă și ajută la luarea unor alegeri bune pentru a conduce cu atenție.
Dar numai utilizarea camerelor pentru a vedea lucruri are probleme, mai ales pe vreme grea, cum ar fi ceața, ploaia abundentă și noaptea. În aceste vremuri, imaginile de la camere pot arăta ciudat și dezordonat, ceea ce poate fi cu adevărat nesigur.
Pentru a face față acestor situații dificile, avem nevoie de senzori speciali care pot funcționa atunci când este cu adevărat întuneric sau chiar noapte. De asemenea, ar trebui să poată măsura cât de departe sunt lucrurile fără a avea nevoie de lumină pe care o putem vedea. Când punem acești senzori în ochii mașinii (sistem de percepție), mașina devine mai bună la condus pe vreme rea sau când este greu de văzut. Deci, mașina poate conduce mai sigur, ceea ce este grozav pentru toți cei care conduc pe drum.
#2. LiDAR
LiDAR, care înseamnă Light Detection And Ranging, este o tehnologie de lux care folosește lasere pentru a afla cât de departe sunt lucrurile. LiDAR trimite raze laser și măsoară cât timp durează să se întoarcă de la lucruri.

Când LiDAR și camerele lucrează împreună, ele ajută mașina să înțeleagă lucrurile mai clar. Face o hartă 3D a ceea ce este în jurul mașinii. Aceste informații speciale pot fi apoi analizate de programele computerizate inteligente, care ajută mașina să ghicească ce ar putea face alte mașini. Acest lucru este util atunci când drumul este dificil, cum ar fi la trecerile aglomerate, deoarece mașina poate urmări alte mașini și poate conduce în siguranță.
Cu toate acestea, LiDAR are limitări care pot fi problematice. Deși funcționează bine noaptea și în medii întunecate, se poate lupta în condiții cu interferențe de la ploaie sau ceață, ceea ce poate duce la inexactități în percepție. Pentru a rezolva aceste probleme, folosim ambii senzori LiDAR și RADAR în același timp. Acești senzori oferă informații suplimentare care ajută mașina să înțeleagă lucrurile mai clar. Mașina se poate conduce singură într-un mod mai sigur și mai bun.
#3. RADAR
RADAR, care înseamnă Radio Detection and Ranging, a fost folosit de mult timp în lucrurile de zi cu zi și, de asemenea, de către armată. Folosit inițial de armată pentru a detecta obiecte, RADAR calculează distanțe folosind semnale unde radio. În zilele noastre, RADAR-ul este vital în multe mașini, în special în cele cu conducere autonomă.
RADAR este minunat, deoarece poate funcționa în orice fel de vreme și lumină. În loc de lasere, folosește unde radio, ceea ce îl face flexibil și super util. Cu toate acestea, RADAR este considerat un senzor zgomotos, ceea ce înseamnă că poate detecta obstacole chiar și atunci când camera nu vede niciunul.
Creierul mașinii care se conduce singur poate fi confuz de toate semnalele suplimentare de la RADAR, pe care le numim „zgomot”. Pentru a remedia acest lucru, mașina trebuie să curețe informațiile RADAR, astfel încât să poată face alegeri bune.
Curățarea datelor înseamnă folosirea unor trucuri speciale pentru a distinge semnalele puternice de cele slabe, cum ar fi separarea lucrurilor importante de cele nu atât de importante. Mașina folosește un truc inteligent numit Fast Fourier Transforms (FFT) pentru a înțelege și mai bine informațiile.
RADAR și LiDAR oferă informații despre puncte individuale, cum ar fi punctele pe hârtie. Pentru a înțelege mai bine aceste puncte, mașina folosește ceva de genul grupării. Este ca atunci când pui lucruri similare împreună. Mașina folosește metode statistice inteligente, cum ar fi Euclidean Clustering sau K-means Clustering, pentru a combina puncte similare și a le înțelege. Acest lucru face ca mașina să poată conduce mai inteligent și mai sigur.
Localizare
La mașinile cu conducere autonomă, algoritmii de localizare joacă un rol crucial în determinarea poziției și orientării vehiculului în timpul navigării, cunoscut sub numele de Visual Odometry (VO). VO funcționează prin identificarea și potrivirea punctelor cheie în cadre video consecutive.
Mașina se uită la puncte speciale din informații, precum semnele de pe o hartă. După aceea, mașina folosește statistici numite SLAM pentru a afla unde sunt lucrurile și cum se mișcă. Acest lucru ajută mașina să știe ce este în jur, cum ar fi drumurile și oamenii.

Și pentru a face acest lucru și mai bine, mașina folosește ceva numit deep learning. Este ca un computer super-inteligent.
Aceste trucuri fac mașina să înțeleagă foarte bine lucrurile. Rețelele neuronale, cum ar fi PoseNet și VLocNet++, folosesc datele punctului pentru a estima poziția 3D și orientarea obiectelor. Aceste poziții și orientări 3D estimate pot fi apoi utilizate pentru a obține semantica scenei, așa cum este demonstrat în imaginea de mai jos. Când mașina folosește trucuri de matematică și computere inteligente, știe unde se află și ce este în jurul ei. Acest lucru ajută mașina să circule în siguranță și fără probleme pe cont propriu.
Previziune
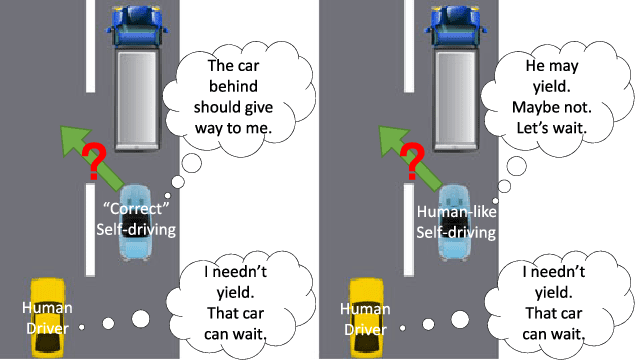
Înțelegerea conducătorilor umani este într-adevăr o sarcină complexă, deoarece implică mai degrabă emoții și reacții decât o logică simplă. Deoarece nu știm ce vor face alți șoferi, este esențial pentru mașinile care se conduc singure să facă ghiciri bune despre acțiunile lor. Acest lucru ajută la asigurarea siguranței pe drum.
Imaginați-vă că mașinile care se conduc singure au ochi peste tot, ca o vedere de 360 de grade. Acest lucru le permite să vadă tot ce se întâmplă. Ei folosesc aceste informații cu învățare profundă. Mașina folosește tehnici inteligente pentru a prezice ce ar putea face alți șoferi. Este similar cu a juca un joc în care plănuiești din timp să faci bine.
 Predicție folosind Deep Learning
Predicție folosind Deep Learning
Senzorii speciali din mașinile cu conducere autonomă sunt ca ochii lor. Ele ajută mașinile să știe ce lucruri sunt în imagini, să găsească lucruri în jurul lor, să știe unde sunt și să vadă unde se termină lucrurile. Acest lucru ajută mașina să descopere ce este în apropiere și să facă alegeri inteligente.
În timpul antrenamentului, algoritmii de învățare profundă modelează informații complexe din imagini și puncte de date din cloud obținute din LiDAR și RADAR. În timpul conducerii efective (deducere), același model ajută mașina să se pregătească pentru posibile mișcări, inclusiv frânare, oprire, încetinire, schimbarea benzii și multe altele.
Învățarea profundă este ca un ajutor inteligent pentru mașină. Acest lucru face ca mașina să înțeleagă lucruri despre care nu este sigură, să-și descopere locația și să conducă mai bine. Acest lucru menține conducerea în siguranță și îl face să meargă mai lin.
Dar, partea dificilă este să decizi cea mai bună acțiune din câteva opțiuni. Alegerea mișcărilor potrivite necesită o gândire atentă, astfel încât mașina să poată conduce bine și să rămână în siguranță.
Luarea deciziilor
Mașinile care se conduc singure trebuie să facă alegeri importante în situații dificile, dar nu este ușor. Acest lucru se datorează faptului că este posibil ca senzorii să nu fie întotdeauna corecti, iar oamenii de pe drum pot face lucruri neașteptate. Mașina trebuie să ghicească ce vor face alții și să se miște pentru a evita accidentele.
Pentru a face alegeri, mașina are nevoie de multe informații. Mașina adună aceste informații folosind senzori și apoi folosește algoritmi de învățare profundă pentru a înțelege unde sunt lucrurile și pentru a prezice ce s-ar putea întâmpla. Localizarea ajută mașina să-și cunoască poziția inițială, în timp ce predicția generează multiple acțiuni posibile în funcție de mediu.
Cu toate acestea, întrebarea rămâne: cum alege mașina cea mai bună acțiune dintre multele prezise?
 Sursa: semanticscholar.org
Sursa: semanticscholar.org
Deep Reinforcement Learning (DRL) este o tehnică de luare a deciziilor și folosește un algoritm numit Markov Decision Process (MDP). MDP este util pentru a ghici cum ar putea acționa oamenii de pe drum în viitor. Când se mișcă mai multe lucruri, lucrurile devin mai complicate. Aceasta înseamnă că mașina cu conducere autonomă trebuie să se gândească la și mai multe acțiuni posibile.
Pentru a face față provocării de a găsi cea mai bună mișcare pentru mașină, modelul de deep learning este optimizat folosind optimizarea bayesiană. În unele cazuri, un cadru care combină un model Markov ascuns și optimizarea bayesiană este folosit pentru luarea deciziilor, permițând mașinii cu conducere autonomă să navigheze eficient și în siguranță în diferite scenarii complexe.
 Sursă: arxiv.org
Sursă: arxiv.org
Luarea deciziilor în mașinile cu conducere autonomă urmează un proces ierarhic cu patru componente cheie:
Planificarea traseului sau a rutei: La începutul călătoriei, mașina determină cea mai bună rută de la poziția actuală până la destinația dorită. Scopul este de a găsi o soluție optimă între diversele rute posibile.
Arbitraj de comportament: mașina trebuie să vireze pe traseu după ce a planificat-o. Mașina este conștientă de obiecte statice, cum ar fi drumuri și intersecții, dar nu poate prevedea acțiunile exacte ale altor șoferi. Pentru a gestiona această incertitudine, folosim metode inteligente precum Procesele de decizie Markov (MDPs) pentru planificare.
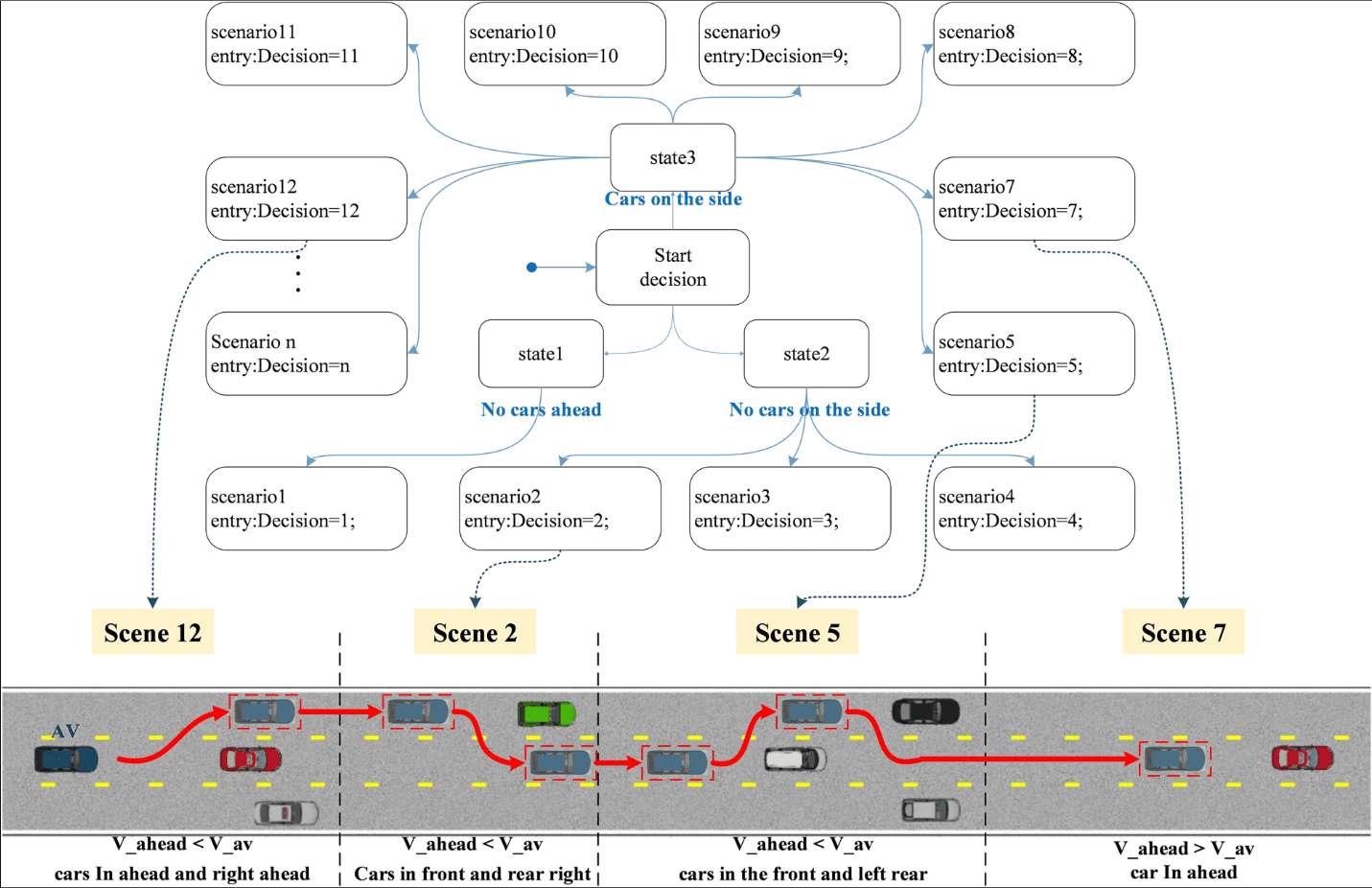 Decizia de scenariu a mașinii de top de stat
Decizia de scenariu a mașinii de top de stat
Planificarea mișcării: Cu traseul planificat și stratul de comportament determinând modul de navigare al acestuia, sistemul de planificare a mișcării coordonează mișcările mașinii. Aceasta înseamnă să vă asigurați că mașina se mișcă într-un mod sigur și confortabil pentru oamenii din interior. Se gândește la lucruri precum cât de repede merge, schimbarea benzilor și ce este în jur.
Controlul vehiculului: Pasul final este controlul vehiculului, care execută calea de referință generată de sistemul de planificare a mișcării, asigurându-se că mașina urmează traiectoria prevăzută fără probleme și în siguranță.
Prin împărțirea procesului decizional în aceste părți diferite, mașinile cu conducere autonomă pot conduce bine și în siguranță în locuri complicate. Acest lucru asigură că pasagerii au o călătorie lină și confortabilă.
Rețele neuronale convoluționale
Rețelele neuronale convoluționale (CNN) sunt utilizate pe scară largă în mașinile cu conducere autonomă datorită capacității lor de a modela informații spațiale, în special imagini. CNN-urile excelează la extragerea de caracteristici din imagini, făcându-le utile pentru a descoperi o mulțime de lucruri diferite.
Într-un CNN, pe măsură ce adâncimea rețelei crește, diferite straturi captează modele diferite. Straturile timpurii detectează caracteristici simple, cum ar fi marginile, în timp ce straturile mai profunde le recunosc pe cele mai complexe, cum ar fi formele obiectelor (cum ar fi frunzele de pe copaci sau anvelopele de pe vehicule). Această adaptabilitate este motivul pentru care CNN-urile sunt un algoritm central în mașinile cu conducere autonomă.
Componenta de bază a unui CNN este stratul convoluțional, care utilizează un nucleu convoluțional (matrice de filtru) pentru a procesa regiunile locale ale imaginii de intrare.
Matricea de filtrare este actualizată în timpul antrenamentului pentru a obține ponderi semnificative. O proprietate fundamentală a CNN-urilor este împărțirea greutății, în care aceiași parametri de greutate sunt utilizați pentru a reprezenta diferite transformări, economisind spațiu de procesare și permițând reprezentări diverse ale caracteristicilor.
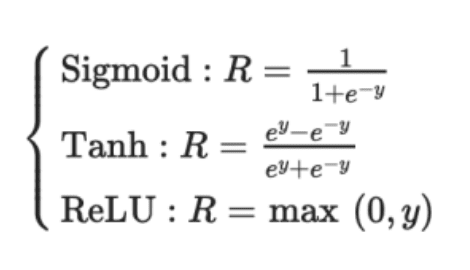
Ieșirea stratului convoluțional este de obicei trecută printr-o funcție de activare neliniară, cum ar fi Sigmoid, Tanh sau ReLU. ReLU este preferat deoarece converge mai repede decât celelalte. De asemenea, rezultatul trece adesea printr-un strat de max-pooling. Acest lucru păstrează detaliile importante din imagine, cum ar fi fundalul și texturile.
Trei proprietăți esențiale ale CNN-urilor le fac versatile și fundamentale în mașinile cu conducere autonomă:
- Câmpuri receptive locale
- Greutăți comune
- Eșantionarea spațială
Aceste proprietăți reduc supraadaptarea și stochează reprezentări și caracteristici critice esențiale pentru clasificarea, segmentarea, localizarea imaginilor și multe altele.
Iată două rețele CNN utilizate de companiile pionierate cu mașinile autonome:
- HydraNet de la Tesla
- ChauffeurNet de la Google Waymo
Aflați mai multe despre rețelele neuronale convoluționale.
#1. HydraNet de la Tesla
HydraNet este o arhitectură dinamică introdusă de Ravi et al. în 2018, dezvoltat în primul rând pentru segmentarea semantică a mașinilor cu conducere autonomă. Obiectivul său cheie este de a îmbunătăți eficiența de calcul în timpul inferenței.
Conceptul de HydraNet presupune a avea diferite rețele CNN, numite ramuri, alocate unor sarcini specifice. Fiecare ramură primește diverse intrări, iar rețeaua poate alege selectiv ce ramuri să ruleze în timpul inferenței, agregând în cele din urmă ieșirile de la diferite ramuri pentru a lua o decizie finală.
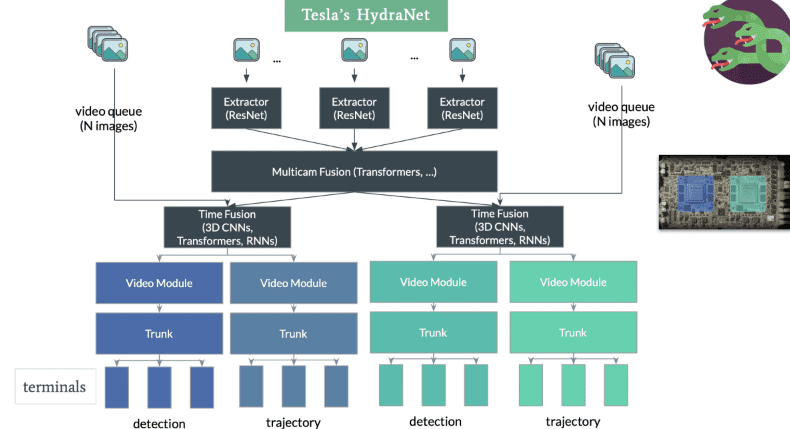
În contextul mașinilor cu conducere autonomă, intrările pot reprezenta diferite aspecte ale mediului, cum ar fi obiecte statice (copaci și balustrade de drum), drumuri și benzi, semafoare etc. Aceste intrări sunt antrenate în ramuri separate. În timpul inferenței, mecanismul de poartă decide ce ramuri să activeze, iar combinatorul își colectează ieșirile pentru a lua decizia finală.
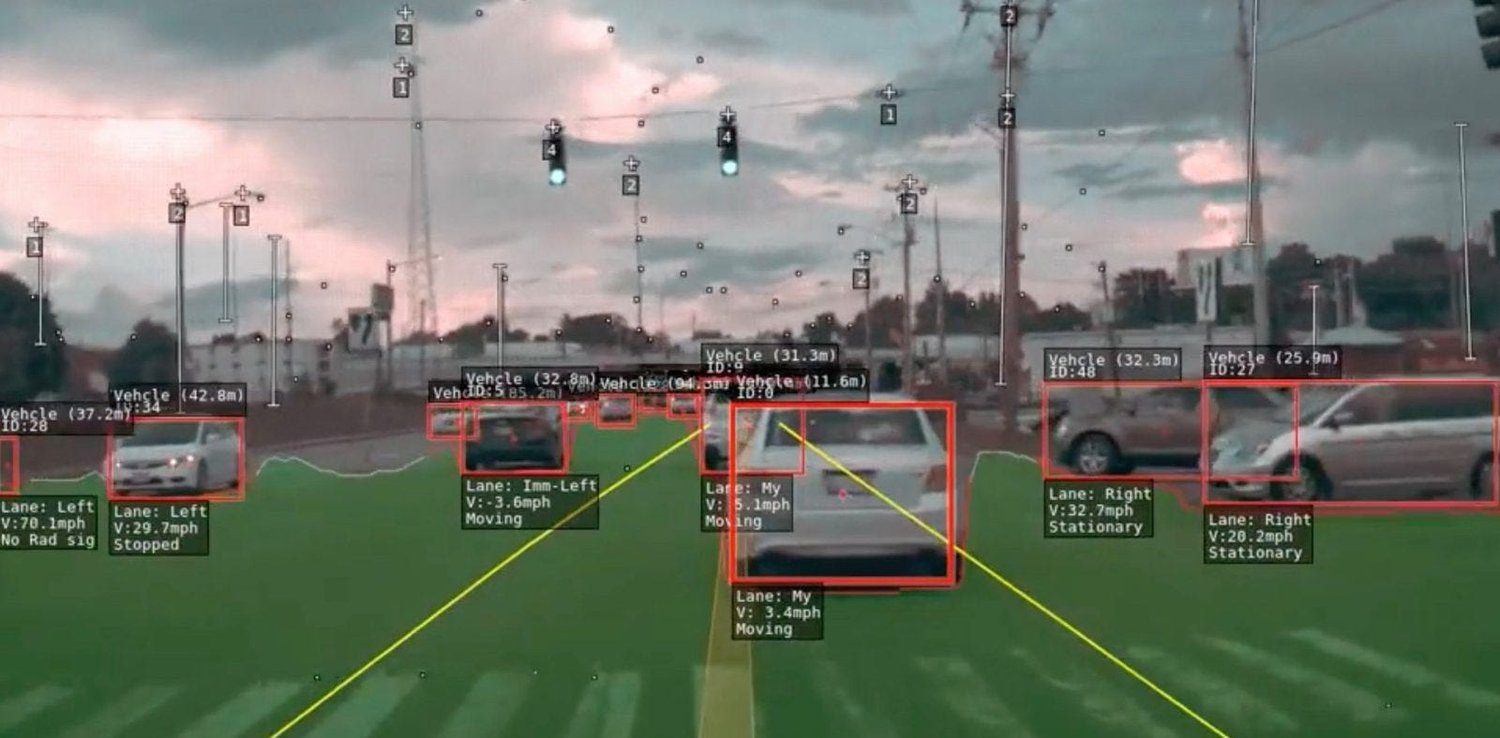 Detectarea vitezei, a benzii și a mișcării
Detectarea vitezei, a benzii și a mișcării
Tesla a adaptat arhitectura HydraNet, încorporând o coloană vertebrală partajată pentru a aborda provocările în segregarea datelor pentru sarcini individuale în timpul inferenței. Backbone partajat, de obicei blocuri ResNet-50 modificate, permite rețelei să fie antrenată pe datele tuturor obiectelor. Capetele specifice sarcinilor bazate pe arhitectura de segmentare semantică, cum ar fi U-Net, permit modelului să prezică rezultate specifice fiecărei sarcini.

HydraNet de la Tesla se remarcă prin capacitatea sa de a proiecta o vedere de pasăre, creând o reprezentare 3D a mediului din orice unghi. Această dimensionalitate îmbunătățită ajută mașina să navigheze mai bine. În mod remarcabil, Tesla reușește acest lucru fără a utiliza senzori LiDAR. În schimb, se bazează pe doar doi senzori: o cameră și un radar. Eficiența HydraNet de la Tesla îi permite să proceseze informații de la opt camere și să genereze percepția în profunzime, demonstrând capabilități impresionante fără a fi nevoie de tehnologie suplimentară LiDAR
#2. ChauffeurNet de la Google Waymo
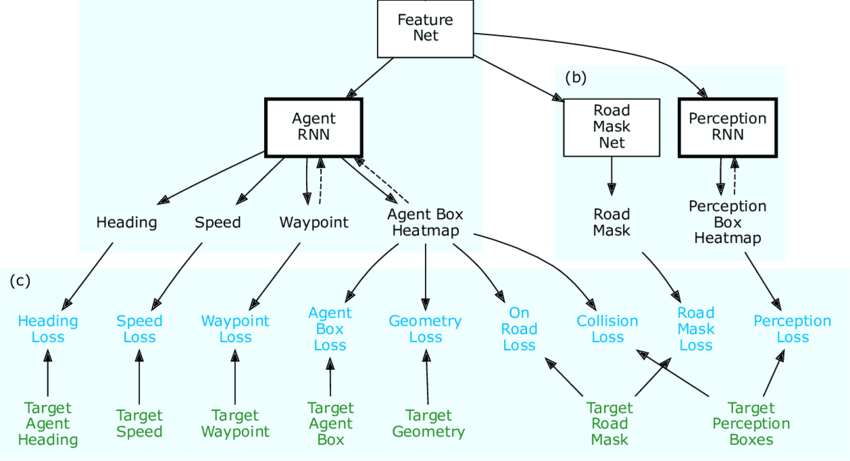
ChauffeurNet este o rețea neuronală bazată pe RNN, utilizată de Google Waymo pentru antrenarea mașinilor cu conducere autonomă folosind învățarea prin imitație. Deși se bazează în primul rând pe un RNN pentru generarea traiectoriilor de conducere, încorporează și o componentă CNN cunoscută sub numele de FeatureNet.
Această rețea de caracteristici convoluționale extrage reprezentări de caracteristici contextuale partajate de alte rețele și este utilizată pentru a extrage caracteristici din sistemul de percepție.
 Sursă: Researchgate
Sursă: Researchgate
Conceptul din spatele ChauffeurNet este de a antrena mașina cu conducere autonomă, imitând șoferi experți folosind învățarea prin imitație. Pentru a depăși limitarea datelor insuficiente de antrenament din lumea reală, autorii lucrării „ChauffeurNet: Learning to Drive by Imitating the Best and Synthesizing the Worst” au introdus date sintetice.
Aceste date sintetice introduc diverse abateri, cum ar fi perturbarea traseului traiectoriei, adăugarea de obstacole și crearea de scene nenaturale. Sa constatat că antrenarea mașinii cu date sintetice este mai eficientă decât utilizarea doar a datelor reale.
În ChauffeurNet, sistemul de percepție nu face parte din procesul de la capăt la capăt, ci acționează ca un sistem de nivel mediu. Acest lucru permite rețelei să aibă diverse variații de intrare față de sistemul de percepție. Rețeaua observă o reprezentare de nivel mediu a scenei de la senzori și, folosind această intrare împreună cu date sintetice, imită comportamentul de conducere expert.
Prin ținerea în considerare a sarcinii de percepție și creând o vedere de ochi de pasăre la nivel înalt asupra mediului, ChauffeurNet facilitează învățarea prin transfer mai ușor, permițând rețelei să ia decizii mai bune, atât pe date reale, cât și pe date simulate. Rețeaua generează traiectorii de conducere prin prezicerea iterativă a punctelor succesive din traseul de conducere pe baza reprezentărilor de nivel mediu. Această abordare s-a dovedit promițătoare în formarea mai eficientă a mașinilor cu conducere autonomă, oferind o cale către sisteme de conducere autonomă mai sigure și mai fiabile.
#3. Procesul de decizie Markov parțial observabil utilizat pentru mașinile cu conducere autonomă
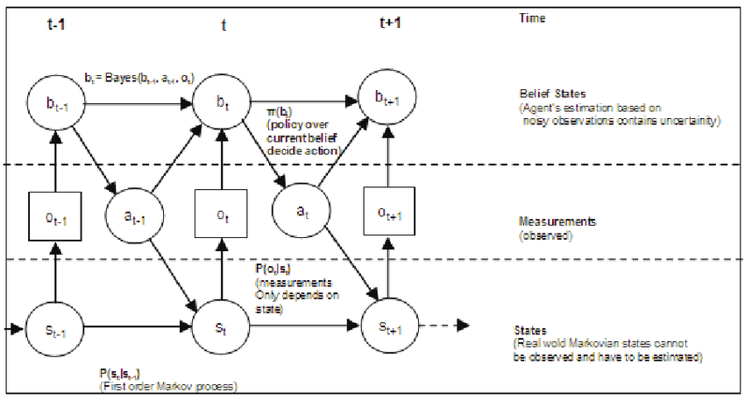
Procesul de decizie Markov parțial observabil (POMDP) este un cadru matematic utilizat în contextul mașinilor cu conducere autonomă pentru a lua decizii în condiții de incertitudine. În scenariile din lumea reală, mașinile cu conducere autonomă au adesea informații limitate despre mediul lor din cauza zgomotului senzorului, a ocluziilor sau a sistemelor de percepție imperfecte. POMDP este conceput pentru a gestiona o astfel de observabilitate parțială și pentru a lua decizii optime, luând în considerare atât incertitudinea, cât și observațiile disponibile.
Într-un POMDP, agentul decizional operează într-un mediu cu stări parțial observabile. Agentul ia măsuri, iar mediul trece la noi stări probabil. Cu toate acestea, agentul primește doar observații parțiale sau informații zgomotoase despre starea reală a mediului. Obiectivul este de a găsi o politică care să maximizeze recompensa cumulativă așteptată în timp, ținând cont de incertitudinea din mediu și de observațiile agentului.
 Sursă: Researchgate
Sursă: Researchgate
În contextul mașinilor cu conducere autonomă, POMDP este deosebit de util pentru sarcini precum planificarea mișcării, predicția traiectoriei și interacțiunea cu alți utilizatori ai drumului. Mașina cu conducere autonomă poate folosi POMDP pentru a lua decizii cu privire la schimbările benzii, ajustările vitezei și interacțiunile cu pietonii și alte vehicule, ținând cont de incertitudinea din mediul înconjurător.
POMDP are șase componente și poate fi notat ca POMDP
M:= (I, S, A, R, P, γ)
Unde,
I: Observații
S: set finit de stări
A: Set finit de acțiuni
R: Funcția de recompensă
P: Funcția de probabilitate de tranziție
γ: factor de reducere pentru recompense viitoare.
POMDP-urile pot fi dificile din punct de vedere computațional din cauza necesității de a lua în considerare mai multe stări și observații posibile. Cu toate acestea, algoritmi avansați, cum ar fi planificarea spațiului de credință și metodele Monte Carlo, sunt adesea folosiți pentru a aproxima eficient politica optimă și pentru a permite luarea deciziilor în timp real în mașinile cu conducere autonomă.
Prin încorporarea POMDP în algoritmii lor de luare a deciziilor, mașinile cu conducere autonomă pot naviga în medii complexe și incerte mai eficient și mai sigur, ținând cont de incertitudinea citirilor senzorilor și luând decizii informate pentru a-și atinge obiectivele vizate.
Automobilul care se conduce singur, funcționând ca un agent, învață interacționând cu mediul cu învățare prin întărire (RL), un fel de învățare automată. Starea, acțiunea și recompensa sunt cele trei variabile importante care se află în centrul Învățării prin consolidare profundă (DRL).
Stare: Descrie situația actuală a mașinii care se conduce singur la un moment dat, cum ar fi poziția sa pe șosea.
Acțiune: reprezintă toate mișcările posibile pe care le poate face mașina, inclusiv decizii precum schimbarea benzii sau ajustările vitezei.
Recompensă: Oferă feedback mașinii ori de câte ori aceasta întreprinde o anumită acțiune. Recompensa poate fi pozitivă sau negativă, iar scopul DRL este de a maximiza recompensele cumulate.
Spre deosebire de învățarea supravegheată, în care algoritmului i se oferă în mod explicit acțiunile corecte, DRL învață explorând mediul și primind recompense pe baza acțiunilor sale. Rețeaua neuronală a mașinii cu conducere autonomă este antrenată pe date de percepție, care includ caracteristici extrase de rețelele neuronale convoluționale (CNN).
Algoritmii DRL sunt apoi antrenați pe aceste reprezentări, care sunt transformări dimensionale inferioare ale intrării, rezultând o luare a deciziilor mai eficientă în timpul inferenței.
Antrenarea mașinilor cu conducere autonomă în scenarii din lumea reală este periculoasă și nepractică. În schimb, ei sunt instruiți în Simulatoare, unde nu există niciun risc pentru siguranța umană.
 Simulator
Simulator
Unele simulatoare open-source sunt:
Combinând datele de percepție cu învățarea de întărire, mașinile cu conducere autonomă pot învăța să navigheze în medii complexe, să ia decizii sigure și optime și să devină mai abil în gestionarea scenariilor de condus din lumea reală.
Întrebări frecvente
Ce sunt vehiculele autonome?
Vehiculele autonome, denumite în mod obișnuit mașini cu conducere autonomă, sunt automobile cu senzori de ultimă oră și inteligență artificială care pot naviga și conduce singure. Aceste vehicule își evaluează mediul înconjurător și fac judecăți de conducere folosind camere, LiDAR, RADAR și algoritmi sofisticați.
Sunt vehiculele autonome sigure?
În dezvoltarea autoturismelor cu conducere autonomă, siguranța este pe primul loc. Pentru a se asigura că respectă reglementările înalte de siguranță, aceste vehicule sunt supuse unor teste și simulări amănunțite. Deși au existat incidente în timpul testării, obiectivul final este de a face mașinile cu conducere autonomă mai sigure decât cele conduse de oameni.
Pot fi folosite vehicule autonome în orice vreme?
Vremea extremă, inclusiv ploile abundente sau zăpada, ar putea prezenta probleme pentru mașinile care se conduc singure. Vremea nefavorabilă ar putea reduce acuratețea senzorilor și poate afecta capacitatea de conducere. Inginerii încearcă în mod constant să facă tehnologia să funcționeze mai bine în condiții meteorologice nefavorabile.
Vehicule autonome – sunt permise?
Legalitatea vehiculelor autonome variază în funcție de țară și locație. Pentru a găzdui vehiculele autonome, multe jurisdicții își revizuiesc legile și reglementările. Testarea mașinilor cu conducere autonomă și implementarea limitată sunt deja permise în unele zone.
Vehiculele autonome au nevoie de intervenție umană?
Majoritatea mașinilor cu conducere autonomă disponibile în prezent sunt la nivelul 2 sau nivelul 3 de automatizare, unde ar putea avea nevoie de asistență umană uneori. Cu toate acestea, industria se străduiește să atingă niveluri mai înalte de automatizare, cum ar fi nivelul 4 sau nivelul 5, unde intervenția umană devine minimă sau inutilă.
Concluzie
În concluzie, mașinile cu conducere autonomă au capacitatea de a transforma industria auto prin îmbunătățirea eficienței și siguranței rutiere. Am analizat toate componentele esențiale care acceptă aceste mașini autonome, inclusiv LiDAR, RADAR, camere și algoritmi avansați.
Deși progresul a fost promițător, există încă provocări importante de abordat. În prezent, mașinile cu conducere autonomă sunt la nivelul 2 din nivelul 5 de avansare, necesitând intervenția umană în anumite scenarii. Cu toate acestea, prin dăruire și inovare continuă, ne apropiem tot mai mult de obținerea autonomiei depline.
Recomandări cheie
Algoritmi avansati: O optimizare suplimentară a algoritmilor este crucială pentru a îmbunătăți percepția rutieră, în special în condiții dificile în care marcajele și semnele rutiere pot lipsi.
Rafinarea modalității de detectare: Îmbunătățirea acurateței și eficienței modalităților de detectare pentru cartografiere și localizare va fi esențială în atingerea unor niveluri mai ridicate de autonomie.
Comunicarea vehicul-la-vehicul: Crearea unui ecosistem rutier conectat și inteligent va fi posibilă prin urmărirea comunicării vehicul-la-vehicul.
Interacțiunea om-mașină: încurajarea acceptării publice a tehnologiilor de conducere autonomă va necesita examinarea și abordarea problemelor legate de interacțiunea om-mașină.
Perspective de viitor: În ciuda dificultăților, realizările de până acum sunt remarcabile și, cu cooperarea și cercetarea continuă, mașinile cu conducere autonomă oferă potențialul de a oferi un mediu de transport mai sigur și mai eficient pentru toată lumea.
Suntem cu toții în aceeași călătorie către mașini complet autonome cu conducere autonomă. Pe măsură ce rezolvăm provocările și stimulăm inovația, ne apropiem de un moment în care vehiculele ne gestionează fără probleme drumurile, îmbunătățind siguranța, mediul și confortul pentru toată lumea.
Acum puteți afla despre calculul spațial și despre aplicarea acesteia în dezvoltarea mașinilor cu conducere autonomă.